NỘI DUNG CHÍNH
- 1 Bài viết liên quan
- 2 Bộ điều khiển động cơ bước
- 3 Video kết nối và cài đặt động cơ bước TB6600, DM556
- 4 Bản vẽ điện
- 4.1 Bản vẽ động cơ bước TB6600
- 4.2 Bản vẽ động cơ bước DM556
- 4.3 Chi tiết kết nối động cơ bước BL-TB6600-V1.2 và màn hình tích hợp PLC YKHMI
- 4.4 Bản vẽ kết nối 3 động cơ bước
- 5 Thay đổi chiều quay động cơ bước
- 6 Thiết lập dòng điện động cơ bước
- 7 Thiết lập số xung trên 1 vòng quay động cơ / pulse per revolution
- 8 Tính số xung của PLC cho bộ động cơ bước và vit me
- 9 Lập trình màn hình YKHMI
- 10 Video lập trình HMI
Bài viết liên quan
- Màn hình YKHMI 4.3″ tích hợp PLC JK3U(FX3U). Chi tiết
- PLC FX3U. Chi tiết
- Lập trình màn hình YKHMI-Bài 1: Tạo dự án mới. Chi tiết
- Phần mềm lập trình YKHMI. Chi tiết
Bộ điều khiển động cơ bước

Video kết nối và cài đặt động cơ bước TB6600, DM556
Bản vẽ điện
Bản vẽ động cơ bước TB6600
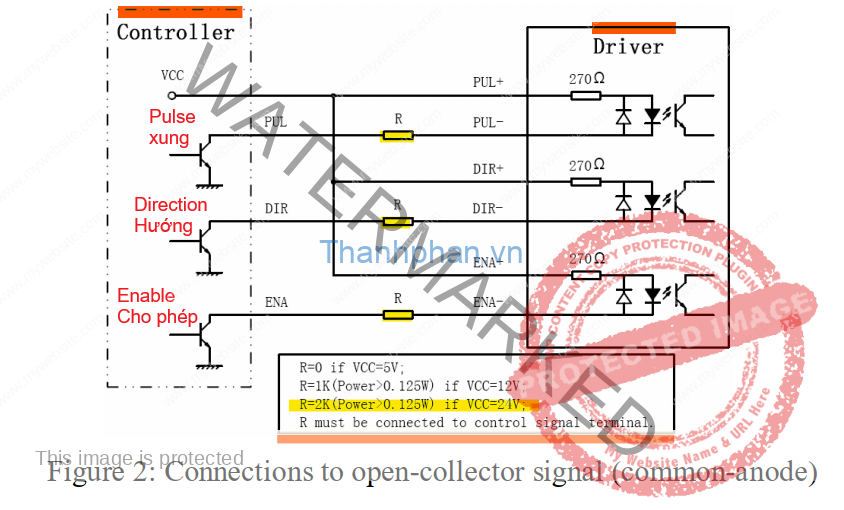
Bộ điều khiển có ngỏ ra xung âm ( cực thu hở ) / ( open – collector signal ) Common anode connection

Controller :
- PLC Mitsubisi FX1S, FX1N, FX3S, FX3U,..
- PLC Delta: ES2 …
- Adruno
- Màn hình tích hợp PLC YKHMI tương thích PLC FX1S, FX1N, FX3S, JT3U(FX3U)
Chú ý:
Khi dùng nguồn cấp VCC
- 5 VDC: R=0 không cần điện trở bên ngoài
- 12 VDC: R = 1 KOhm 1/8W
- 24 VDC: R = 2 KOhm 1/8W
Bản vẽ cho bộ điều khiển MCU (arduino) dùng nguồn VCC 5 VDC

Bộ điều khiển có ngỏ ra xung dương / (PNP signal )Common cathode connection
Bản vẽ cho bộ điều khiển MCU (arduino) dùng nguồn VCC 5 VDC

Bản vẽ động cơ bước DM556
Tham khảo tài liệu Driver DM556 của Leadshine
Bộ điều khiển có ngỏ ra xung âm ( cực thu hở ) / ( open – collector signal ) Common anode connection
Controller :
- PLC Mitsubisi FX1S, FX1N, FX3S, FX3U,..
- PLC Delta: ES2 …
- Adruno
- Màn hình tích hợp PLC YKHMI tương thích PLC FX1S, FX1N, FX3S, JT3U(FX3U)
Chú ý:
Khi dùng nguồn cấp VCC
-
- 5 VDC: R=0 không cần điện trở bên ngoài
- 12 VDC: R = 1 KOhm Power > 0.125 W
- 24 VDC: R = 2 KOhm Power > 0.125 W
Bộ điều khiển có ngỏ ra xung dương / (PNP signal )Common cathode connection
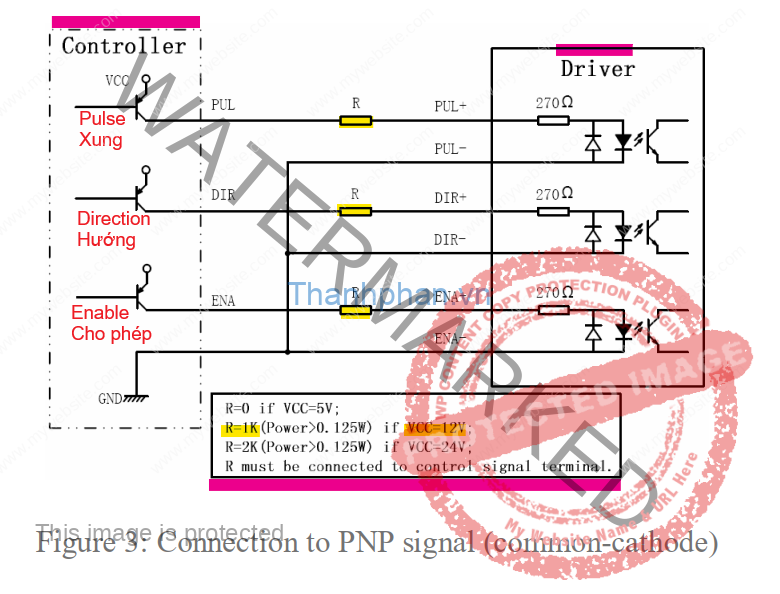
Controller/ bộ điều khiển: PLC Siemens S7-200, S7-1200 …
Chú ý:
Khi dùng nguồn cấp VCC
Chi tiết kết nối động cơ bước BL-TB6600-V1.2 và màn hình tích hợp PLC YKHMI

Do màn hình tích hợp PLC YKHMI có điện trở bên trong 1 KOhm nên không cần dùng thêm điện trở ngoài
Bản vẽ kết nối 3 động cơ bước
Áp dụng cho bộ điều khiển động cơ bước bên dưới:
1. BL-TB6600-V1.2
2. DM556
3. HB556AC

Thay đổi chiều quay động cơ bước
Điều khiển chân hướng
Thay đổi tín hiệu DIR hoăc CW- ON hoặc OFF từ bộ điều khiển PLC để có chiều quay động cơ mong muốn
Hoán đổi chân kết nối động cơ bước
Cuộn dây động cơ bước 2 pha

Hoán đổi dây nguồn motor: A+ A- hoặc B+ B-

Cách 1: Giữ nguyên cặp dây B+ B-. Hoán đổi dây A+ và A- với nhau
Cách 2: Giữ nguyên cặp dây A+ A-. Hoán đổi dây B+ và B- với nhau
Thiết lập dòng điện động cơ bước
Dòng điện / Dynamic curent
For a given motor, higher Driver current will make the motor to output more torque, but at the same
time causes more heating in the motor and Driver. Therefore, output current is generally set to be
such that the motor will not overheat for long time operation. Since parallel and serial connections of
motor coils will significantly change resulting inductance and resistance, it is therefore important to
set Driver output current depending on motor phase current, motor leads and connection methods.
Phase current rating supplied by motor manufacturer is important in selecting Driver current,
however the selection also depends on leads and connections
Trích dẫn tài liệu: DM556 của Leadshine
Đối với một motor xác định, dòng điện của Driver cao hơn làm cho motor xuất nhiều mô men hơn, nhưng cùng lúc sinh ra nhiều nhiệt hơn ở motor và Driver. Bởi vậy, thiết lập dòng điện để mà motor không quá nhiệt trong thời gian dài. Vì kết nối song song và nối tiếp của cuộn dây motor sẽ thay đổi cuộn cảm và điện trở, bởi vậy điều quan trọng là thiết lập dòng điện của Driver phụ thuộc vào dòng điện motor, số đầu dây motor và phương pháp kết nối. Dòng định mức được cung cấp bởi nhà sản xuất là thông số quan trọng để thiết lập dòng điện cho Driver, tuy nhiên lựa chọn cũng phụ thuộc và số đầu dây và phướng pháp kết nối.

Notes: Due to motor inductance, the actual current in the coil may be smaller than the dynamic
current setting, particularly under high speed condition.
Chú ý: do cuộn kháng motor nên dòng điện thực tế có thể nhỏ hơn dòng điện thiết lập, thực tế dưới điều kiện tốc độ cao
Cài đặt dòng điện
In our experience, we usually match the RMS value on the driver to the rated current of the motor to ensure higher performance. When we feel that the motor is overheating, we match the rated current of the motor to the PEAK value on the driver.
Theo kinh nghiệm, chúng tôi thiết lập giá trị RMS trên Driver khớp với dòng điện định mức trên nhãn của động cơ để đảm bảo hoạt động cao hơn. Khi chúng tôi cảm thấy động cơ đang bị quá nhiệt, chúng tôi thiết lập dòng định mức trên nhãn của động cơ với giá trị PEAK trên Driver.
Additionally, under short-term working cycle conditions, we recommend using the RMS value, and under long-term working cycle conditions, we recommend using the PEAK value.
Thêm vào đó, dưới chu kỳ hoạt động ngắn, chúng tôi khuyên rằng dùng giá trị RMS và dưới chu kỳ hoạt động dài, chúng tôi khuyên dùng giá trị PEAK.
Dòng điện khi động cơ đứng yên / Stanstill motor curent
Dòng điện này cũng ảnh hưởng đến sự tăng nhiệt độ ở động cơ. Nếu nhiệt độ trên động cơ cao thì chọn dòng điện này bằng một nữa dòng điện cài đặt bằng cách chỉnh công tắc SW4 trên driver ” Half curent “
Bộ điều khiển Driver DM556:
SW4 is used for this purpose. OFF meaning that the standstill current is set to be half of the selected
dynamic current, and ON meaning that standstill current is set to be the same as the selected dynamic current.
SW4: OFF. Dòng điện khi động cơ đứng yên bằng một nữa dòng điện động thiết lập
SW4: ON Dòng điện khi động cơ đứng yên bằng dòng điện động thiết lập
Thiết lập số xung trên 1 vòng quay động cơ / pulse per revolution
Step Angle in Stepper Motor / Góc bước
The step angle of a stepper motor is defined as the angle by which the rotor of a stepper motor moves when one input pulse is applied to the stator of the motor. The step angle is expressed in degrees. The step angle decides the resolution of positioning of a stepper motor i.e. smaller the step angle, the higher is the resolution of positioning of the motor.
Trích dẫn: https://www.tutorialspoint.com/step-angle-in-stepper-motor
Góc bước của động cơ bước được định nghĩa là góc mà rotor của động cơ bước di chuyển khi một xung được đưa vào stator của động cơ. Góc bước có đơn vị là độ. Nó quyết định độ phân giải vị trí của đông cơ bước, ví dụ: góc bước nhỏ thì độ phân giải cho vị trí cao
Stepper motors can be designed for very small step angles. A standard stepper motor will have a step angle of 1.8° with 200 steps per revolution
Motor bước chuẩn có góc bước 1.8 độ với 200 bước trên 1 vòng:
1.8 độ x 200 = 360 độ
Ngoài ra, motor có góc bước 0.9 độ với 400 bước trên 1 vòng
Step angle of 0.9 with 400 steps per revolution
Vi bước / Micro – step

Step angle = Motor Step Angle / Micro Step
Ví dụ:
Đối với động cơ bước: có góc bước 1.8 độ.
1. Micro step 4: Vi bước = 1.8 / 4 = 0.45 độ.
( 4 xung : rotor quay được 1.8 độ)
Khi một xung của bộ điều khiển động cơ bước driver đưa vào stator của động cơ thì rotor quay được 0.45 độ.
Để rotor quay 1 vòng thì cần: 360 độ / 0.45 ( độ/xung)= 800 xung
2. Micro step 8: Vi bước = 1.8 / 8 = 0.225 độ.
( 8 xung : rotor quay được 1.8 độ)
Khi một xung của bộ điều khiển động cơ bước driver đưa vào stator của động cơ thì rotor quay được 0.225 độ.
Để rotor quay 1 vòng thì cần: 360 độ / 0.225 ( độ/xung)= 1600 xung

Trên bộ điều khiển động cơ bước: thay đổi các switch gạt để chọn vi bước

Động cơ bước này có dòng điện: 3 A
Góc bước: 1.8 độ
Step angle: 1.8 degree
Tính số xung của PLC cho bộ động cơ bước và vit me
Ví dụ:
Trong ứng dụng thực tế : động cơ bước kết nối vít me có bước ren 5 mm theo tỉ lệ 1:1 như hình bên dưới
( theo định nghĩa vít me bước ren 5mm: motor quay 1 vòng thì bàn trượt di chuyển 5,00 mm: )
0,01 mm: cần bao nhiêu xung ?
(điều khiển hành trình bàn trượt)
Theo bảng trên, chọn số xung trên 1 vòng: 1000 hoặc 2000
( motor quay 1 vòng thì bàn trượt di chuyển 5,00 mm
1000 xung /vòng: bàn trượt di chuyển 5,00 mm
2000 xung /vòng: bàn trượt di chuyển 5,00 mm )
- . 1000 xung /vòng: bàn trượt di chuyển 5,00 mm
==> 0,01 mm cần 1000 / 500 = 2 xung
(
1.1 hành trình 5,0 mm: cần 1000 xung
1.2 hành trình 10,0 mm: cần 2000 xung
1.3 hành trình 10,1 mm: cần 2020 xung ) - 2000 xung /vòng: bàn trượt di chuyển 5,00 mm
==> 0,01 mm cần 2000 / 500 = 4 xung
(
1.1 hành trình 5,0 mm: cần 2000 xung
1.2 hành trình 10,0 mm: cần 4000 xung
1.3 hành trình 10,3 mm: cần 4120 xung )

Trích dẫn: https://asun.vn/
Bước ren vít me
Trích dẫn: https://www.helixlinear.com
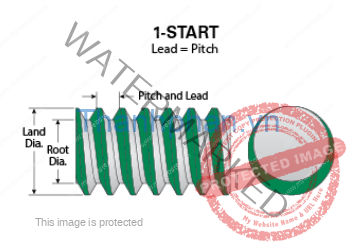
The pitch of a lead screw is simply the distance (spacing) between adjacent threads.
Bước ren đơn giản là khoảng cách giữa những ren kế cận.
Lập trình màn hình YKHMI
Cấu hình model màn hình S430A

Cấu hình PLC FX3U
Chọn Mitsubishi, FX-3U CPU port




