NỘI DUNG CHÍNH
Bản vẽ kết nối của bộ điều khiển AD75P với servo MR-J2S-A
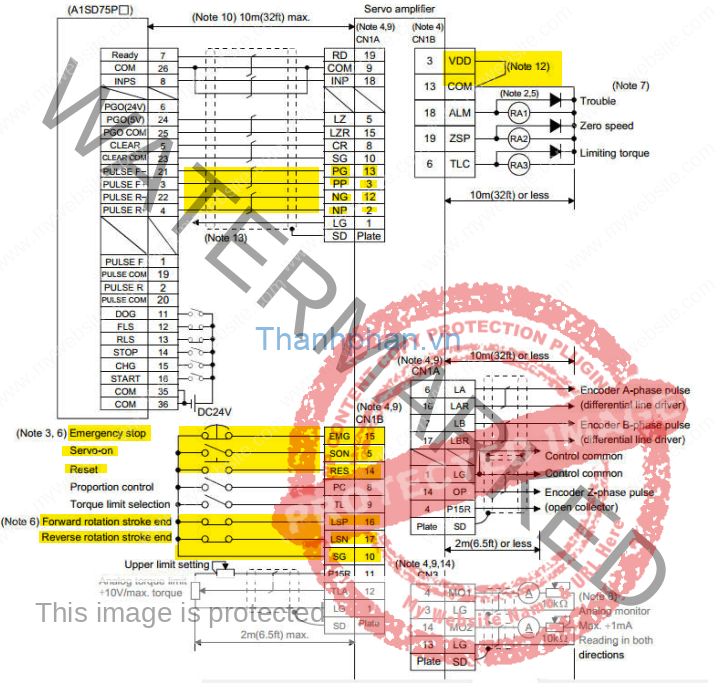
Các chân thường dùng:
CN1B
- SON (5): servo On
- EMG (15): dừng khẩn cấp. Khi chân này hở mạch báo lỗi A.E6 ( Servo emergency stop )
- RES (14): xóa lỗi ( tùy chọn )
- LSP (16): giới hạn quay chiều thuận khi điều khiển vị trí
- LSN (17): giới hạn quay chiều nghịch khi điều khiển vị trí
- SG (10) : chân chung
- VDD (3)
- COM (13)
- ZSP (19) : zero speed (ZSP) / Electromagnetic brake interlock (MBR)
- ALM (18): báo lỗi
CN1A: Chân điều khiển xung và hướng
- OPC (11)
- PP (3)
- NP (2)
- PG (13)
- NG (12)
Bài viết liên quan
- Sơ đồ kết nối servo Mitsubishi MR-J2S-10A. Chi tiết
( video: kết nối dây, chạy JOG kiểm tra Servo ) - Xác định số chân jack kết nối servo mitsubishi MR-J2S-A Chi tiết
( video: xác định số chân jack kết nối servo ) - Tính toán Electronic Gear Servo MR-J2S-A: Tốc độ motor. Chi tiết
( video: tính hệ số gear điện tử CMX/CMD ) - Dùng phần mềm cấu hình servo MR-J2S. Chi tiết
( video: cài đặt servo ) - PLC điều khiển Servo MR-J2S-A. Chi tiết
( 1. Bản vẽ PLC Mitsubishi và màn hình tích hợp PLC YKHMI điều khiển servo
2. Chọn thông số servo cho lệnh xung từ PLC ) - Cách Khắc Phục Lỗi màn hình YKHMI tích hợp PLC FX1S Điều Khiển servo Mitsubishi MR-J2S-10A. Chi tiết
( video: 1. cài đặt servo
2. kiểm tra chân phát xung, lệnh DPLSY, autotuning servo ) - PLC JT3U điều khiển 4 trục, 8 bộ servo và step motor. Chi tiết
( video: mô tả các lệnh phát xung DPLSY, DDRVA, DDRVI
Bản vẽ kết nối PLC và servo Yaskawa, Mitsubishi, motor bước và servo Delta)
Sơ đồ kết nối bên trong bộ điều khiển servo

Note 1. P: Position control mode, S: Speed control mode, T: Torque control mode
P: chế độ điều khiển vị trí, S: chế độ điều khiển tốc độ, T: chế độ diều khiển mô men
2. For the 11kW or more servo amplifier, MO1 is replaced by CN4-1 and MO2 by CN4-2.
Đối với bộ Driver từ 11 KW trở lên: MO1 được thay thế bởi CN4-1 và MO2 bởi CN4-2
Bán cáp kết nối CN1A, CN1B servo MR-J2S-A
- Cáp dài 1.5 m
- Kiểm tra trước khi giao khách hàng, bảo hành 12 tháng
- Cáp CN1A ( tín hiệu điều khiển xung ): Sử dụng dây chống nhiễu
gồm OPC (11), PP (3), NP (2), PG (13) và NG (12). - Cáp CN1B gồm
SON (5): servo On,
EMG (15): dừng khẩn cấp,
LSP (16): giới hạn quay chiều thuận,
LSN (17): giới hạn quay chiều nghịch,
SG (10) : chân chung,
VDD (3),
COM (13)
ALM(18)
RES(14)
ZSP(19)

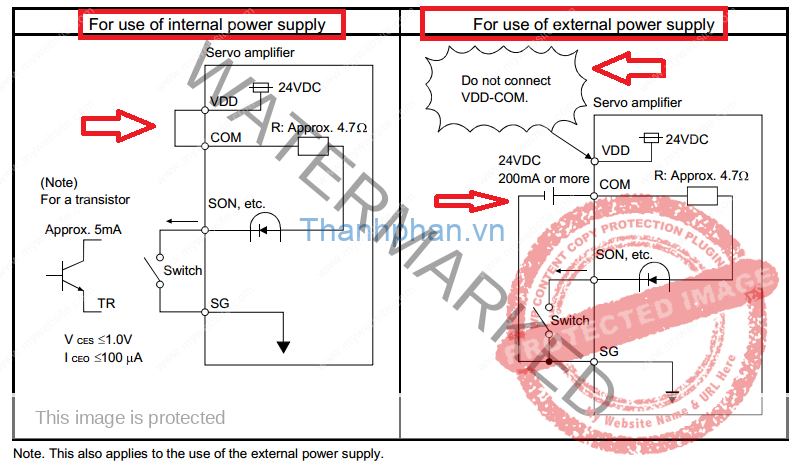
Kết nối dùng nguồn nội và nguồn ngoài
Chú ý: Note 12
Khi sử dụng nguồn nội ( Internal power supply ) thì VDD <–> Com ( VDD kết nối với Com )
Nếu sử dụng nguồn ngoài ( External power supply ) thì không cần
Sơ đồ kết nối bộ servo MR-J2S-A


Lưu đồ cài đặt servo

Motor servo có thắng điện từ
Sơ đồ kết nối

CN1B:
-
- VDD (3)
-
- COM (13)
Chú ý: Sơ đồ này dùng nguồn bên trong bộ điều khiển Servo ( internal power supply) .
Nếu dùng nguồn ngoài ( external power supply) thì xem hình 2 ở bên trên.
The surge absorbing diode installed on the DC output signal relay must be wired in the specified direction. Otherwise, the emergency stop and other protective circuits may not operate.
Lắp đặt Diode đúng chiều trên relay tín hiệu ra DC. Ngược lại, nút dừng khẩn cấp và mạch khác không hoạt động.

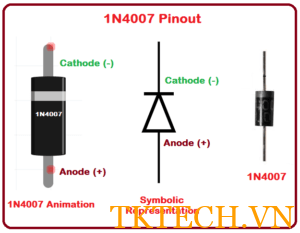
Có thể dùng diode 1N4007.
CN1B:
1) Set “xx1x” in parameter No.1 to make the electromagnetic brake interlock (MBR) valid. Note
that this will make the zero speed signal (ZSP) unavailable
Cài đặt “xx1x” cho thông số No.1 kích hoạt tín hiệu MBR. Chú ý, khi đó tín hiệu ZSP không có tác dụng.
ZSP ( chân 19) : zero speed (ZSP) tốc độ zero hoặc
MBR ( chân 19): Electromagnetic brake interlock (MBR) ( chân tín hiệu dùng cho thắng )
2) Do not share the 24VDC interface power supply between the interface and electromagnetic
brake. Always use the power supply designed exclusively for the electromagnetic brake.
3) The brake will operate when the power (24VDC) switches off.
4) While the reset (RES) is on, the base circuit is shut off. When using the servo motor with a
vertical shaft, use the electromagnetic brake interlock (MBR).
5) Switch off the servo-on (SON) after the servo motor has stopped.
Cài đặt thông số
1) Set “xx1x” in parameter No.1 to make the electromagnetic brake interlock (MBR) valid. Note
that this will make the zero speed signal (ZSP) unavailable
Cài đặt “xx1x” cho thông số No.1 kích hoạt tín hiệu MBR. Chú ý, khi đó tín hiệu ZSP không có tác dụng.
2) Using parameter No. 33 (electromagnetic brake sequence output), set a time delay (Tb) at servo-off
from electromagnetic brake operation to base circuit shut-off as in the timing chart shown in (3) in
this section
Cài đặt thông số thời gian trễ Tb để thắng giữ motor đứng yên
Lưu đồ
(a) Servo-on (SON) command (from controller) ON/OFF
Tb [ms] after the servo-on (SON) signal is switched off, the servo lock is released and the servo
motor coasts. If the electromagnetic brake is made valid in the servo lock status, the brake life may
be shorter. Therefore, when using the electromagnetic brake in a vertical lift application or the
like, set Tb to about the same as the electromagnetic brake operation delay time to prevent a drop.
Khi dùng thắng cho ứng dụng nâng/hạ thẳng đứng, cài đặt Tb như là thời gian trễ để thắng tác động ngăn rơi tự do khi động cơ dừng.

(2) Digital output interface DO-1 ( ngõ ra)

Bán cáp kết nối servo MR-J2S-A và máy tính
- Cáp dài 1.5 m
- Sử dụng dây chống nhiễu
- Kiểm tra trước khi giao khách hàng, bảo hành 12 tháng

Bài viết liên quan:
1. Xác định số chân jack kết nối servo mitsubishi MR-J2S-A Chi tiết
2. Dùng phần mềm cấu hình servo MR-J2S. Chi tiết
3. PLC điều khiển Servo MR-J2S-A. Chi tiết



