Sơ đồ cơ bản kết nối chân xung của servo. Trích nguồn file MR-J2-A – Technical Catalogue 1999 113788-B (12.99). Download
NỘI DUNG CHÍNH
Bản vẽ kết nối chung bộ điều khiển với Servo MR-J2S-A

AM26LS31: Bộ điều khiển Line Driver

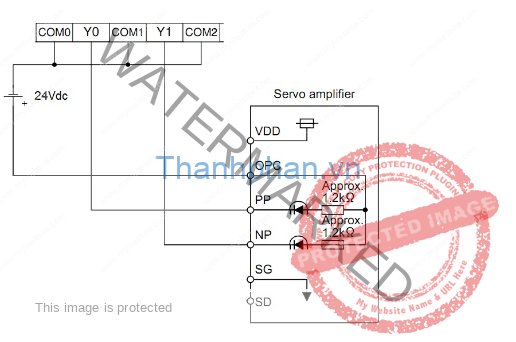
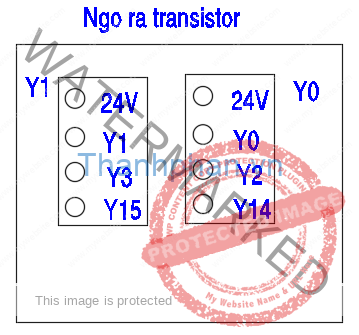
Bộ điều khiển PLC Mitsubishi FX1S-30MT kết nối với MR-J2S-A. Dùng nguồn ngoài. PLC này ngõ ra sink
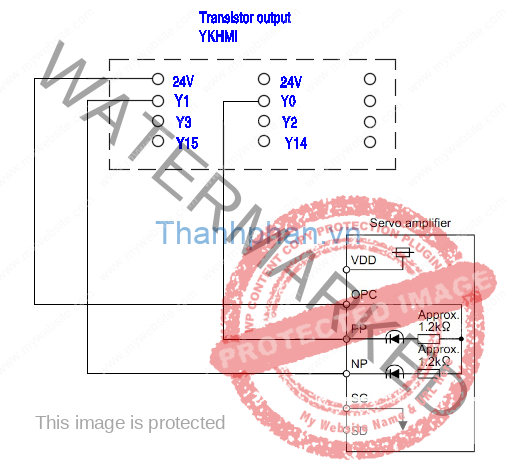
Màn hình tích hợp PLC YKHMI kết nối servo MR-J2S-A
Bài viết liên quan
- Sơ đồ kết nối servo Mitsubishi MR-J2S-10A. Chi tiết
( video: kết nối dây, chạy JOG kiểm tra Servo ) - Xác định số chân jack kết nối servo mitsubishi MR-J2S-A Chi tiết
( video: xác định số chân jack kết nối servo ) - Tính toán Electronic Gear Servo MR-J2S-A: Tốc độ motor. Chi tiết
( video: tính hệ số gear điện tử CMX/CMD ) - Dùng phần mềm cấu hình servo MR-J2S. Chi tiết
( video: cài đặt servo ) - PLC điều khiển Servo MR-J2S-A. Chi tiết
( 1. Bản vẽ PLC Mitsubishi và màn hình tích hợp PLC YKHMI điều khiển servo
2. Chọn thông số servo cho lệnh xung từ PLC ) - Cách Khắc Phục Lỗi màn hình YKHMI tích hợp PLC FX1S Điều Khiển servo Mitsubishi MR-J2S-10A. Chi tiết
( video: 1. cài đặt servo
2. kiểm tra chân phát xung, lệnh DPLSY, autotuning servo ) - PLC JT3U điều khiển 4 trục, 8 bộ servo và step motor. Chi tiết
( video: mô tả các lệnh phát xung DPLSY, DDRVA, DDRVI
Bản vẽ kết nối PLC và servo Yaskawa, Mitsubishi, motor bước và servo Delta)
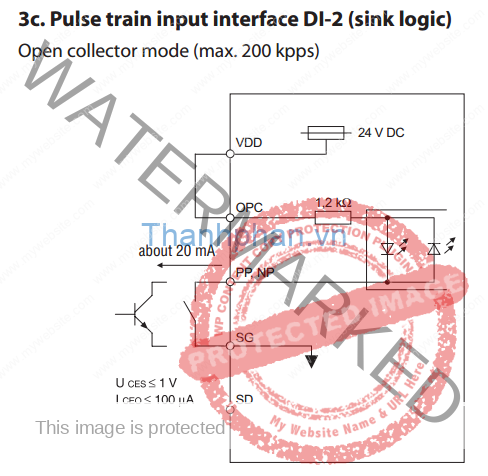
Sơ đồ chân xung của Servo
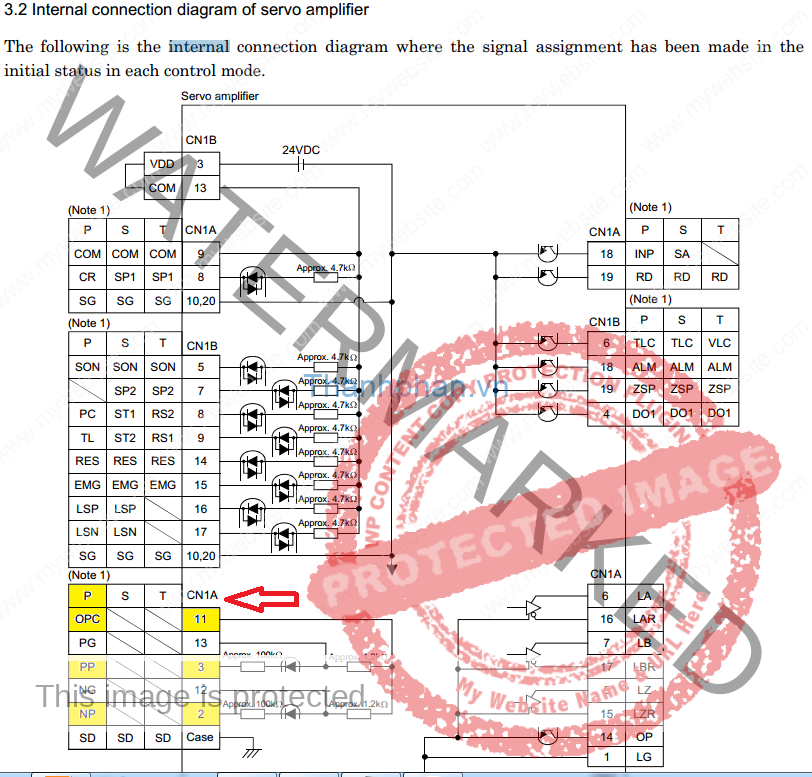
Note 1. P: Position control mode, S: Speed control mode, T: Torque control mode
Cài đặt servo chọn lệnh xung

Mặc định: P21 = 0000
Khi dùng thiết bị YKHMI: tôi cài đặt P21 = 0001 hoặc 0011
Y0: Pulse Train ( xung )
Y1: Sign ( hướng )
Sơ đồ chân jack kết nối CN1A. Chi tiết
Bài viết liên quan:
1. Sơ đồ kết nối servo Mitsubishi MR-J2S-10A. Chi tiết
2. Xác định số chân jack kết nối servo mitsubishi MR-J2S-A. Chi tiết
3. Dùng phần mềm cấu hình servo MR-J2S. Chi tiết
4. Tính toán Electronic Gear Servo MR-J2S-A: Tốc độ motor. Chi tiết



